
:quality(80)/p7i.vogel.de/wcms/1f/a7/1fa7f5ddf7f6e61cfb41eeadc605b1b2/0131918763v2.jpeg "Mobileye will 2027 mit eigenen Robotaxis an den Start gehen. (Bild: Mobileye)")
:quality(80)/p7i.vogel.de/wcms/79/b4/79b48ddeb7fc423a8e60ef10bfbdab79/0131673894v2.jpeg "Freuen sich auf die zukünftige Kooperation: Rafael Manfredi,Abteilungsleiter, IAV Brasilien, Fábio Limeira, Head of Development, Marcopolo) und Michael Schreiber, Managing Director, IAV Brasilien (vlnr). (Bild: IAV )")
:quality(80)/p7i.vogel.de/wcms/a3/cf/a3cfb1dc4d85f32fe92869478baec11a/0131669127v2.jpeg "Rheinmetall verkauft seinen Geschäftsbereich Power Systems an Aequita. (Bild: frei lizensiert bei Pixabay)")
:quality(80)/p7i.vogel.de/wcms/40/81/4081aba92ac4714b7454af57fba88b19/0131666604v2.jpeg "Feierliche Eröffnung des ersten Denza-Stores in Hamburg (Bild: Denza)")
:quality(80)/p7i.vogel.de/wcms/58/56/585606d1247c1344d0b7fccb986e383a/0131974935v2.jpeg "In Hamburg zeigte Bosch eBike Systems neue Systeme für E-Bikes wie den Nabenmotor Hub Line. Auf dem unebenen Hafengelände mit einer ordentlichen Brise ließen sich die neuen Systeme auf Herz und Nieren prüfen. (Bild: Stefanie Eckardt)")
:quality(80)/p7i.vogel.de/wcms/cb/6f/cb6fab787123b4b294d41bce836f7bf9/0131973373v2.jpeg "Ein Volkswagen ID.7 am Elli BiDi Charger: Bidirektionales Laden bindet die Fahrzeugbatterie in das Energiesystem ein und kann helfen, Mobilitätskosten zu senken. (Bild: Volkswagen)")
:quality(80)/p7i.vogel.de/wcms/42/64/42649638d68106914b4e850a70629547/0131954862v2.jpeg "Ab sofort ist ein neuer High Performance Dispenser Bestandteil von Alpitronics HYC1000. (Bild: Alpitronic)")
:quality(80)/p7i.vogel.de/wcms/e4/b0/e4b0eef7b87ac0c5c8af13de9a16d2f7/0131943015v2.jpeg "Mit Vision Data Analyzer 4.1 stellt Accurate Technologies eine MDF4-Analyseplattform für die Automotive-Entwicklung zur Verfügung. (Bild: Accurate Technologies)")
:quality(80)/p7i.vogel.de/wcms/02/45/02452e5f90d78d2db1053475c68079ac/0131948187v2.jpeg "Siemens Mobility hat mit Vectouro eine neue Reisezugplattform für den flexiblen internationalen Einsatz in Europa geschaffen. Hierfür liefert Knorr-Bremse Brems- und Einstiegssysteme. (Bild: Siemens Mobility)")
:quality(80)/p7i.vogel.de/wcms/e3/05/e3052b45feff94facda21ed4bd1464cd/0131869666v2.jpeg "Stellantis, Wayve und Uber wollen eine Kooperation für autonomes Fahren schließen und haben dementsprechend ein Memorandum of Understanding unterzeichnet. (Bild: Stellantis)")
:quality(80)/p7i.vogel.de/wcms/5e/d1/5ed1dc1151a0e33363d1bc1a5378cf98/0131859128v2.jpeg "Für die Luftfahrtindustrie können Brennstoffzellenantriebe zu mehr Nachhaltigkeit beitragen. Ihr Einsatz ist allerdings mit Herausforderungen verbunden. (Bild: FEV)")
:quality(80)/p7i.vogel.de/wcms/4f/bc/4fbc95a0fd4377f7a9e01f6b678be072/0131817931v2.jpeg "3D-Vorschau auf das SAF-Projekt im Hafen von Dunkirk, wo zukünftig das Joint Venture von Technip Energies, Airbus, Safran und Tereos angesiedelt sein wird. (Bild: Technip Engines )")
:quality(80)/p7i.vogel.de/wcms/c3/68/c368a3ad72ac970809451c311e05a07b/0127817359v2.jpeg "Der Erfolg der Zürcher S-Bahn: Die Doppelstockzüge, seit 1990 im Netz der Zürcher
S-Bahn eingesetzt werden. (Bild: SBB/CFF/FFS)")
:quality(80)/p7i.vogel.de/wcms/6a/4f/6a4f63cfca5e01026d25edd19b5302c5/0127761368v3.jpeg "Mit der Bahn quer durch Europa: Durch die neuen Pläne sollen Flüge reduziert werden und der Schienenverkehr ausgebaut werden. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/42/86/4286fd057b5413102fbac1758d2dc55f/0127713923v3.jpeg "Rheinmetall wirde mit dem Red Dot Design Award 2025 für den Ladebordstein im Gesamtwettbewerb „Product Design“ in der Kategorie „Innovative Design“ prämiert. (Bild: Rheinmetall)")
:quality(80)/p7i.vogel.de/wcms/36/49/36496a26b0c295de6d9a36d66ea7571a/0125402418v3.jpeg "Eine chinesische Magnetschwebebahn erreichte 650 km/h in nur 7 Sekunden. (Bild: Dall-E / KI-generiert)")
Autonomes Fahren – Offene Schnittstellen für viele Sensordaten
Sensordaten spielen beim autonomen Fahren eine entscheidende Rolle. Doch fehlt es bisher an einer einheitlichen Schnittstelle. Mit einer Fusionsplattform soll sich das ändern.
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/113400/113491/65.gif "metrofunk-logo.gif ()")
Mithilfe einer seriennahen Fusionsplattform will ein deutscher Forschungsverbund aus Hochschulen, IT-Unternehmen und Forschungseinrichtungen aus dem Umfeld der Automobilindustrie es den Automobilherstellern und ihrer Zulieferern ermöglichen, hoch- und vollautomatisierte Fahrerassistenzfunktionen für das automatisierte Fahren zu ermöglichen. Die Fusionsplattfom verfügt über offene Schnittstellen (Offene-Fusions-Plattform, OFP).
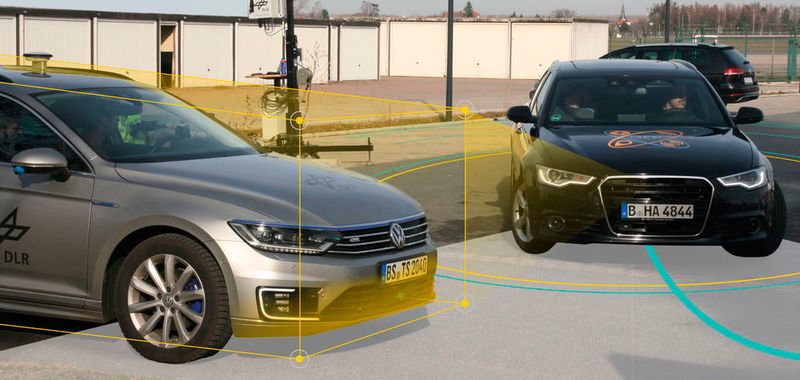
Das vom Bundesministerium für Bildung und Forschung mit 4,4 Mio. Euro geförderte Projekt wurde mit der Integration erster vollautonomer Fahrfunktionen in drei Demonstrationsfahrzeugen erfolgreich nach knapp über drei Jahren abgeschlossen. Bei dem umgesetzten Szenario fährt ein Elektrofahrzeug vollautomatisiert eine freie Ladestation auf einem Parkplatz an und positioniert sich über der Ladeplatte. Nach dem abgeschlossenen Ladevorgang sucht es sich vollautomatisiert einen freien Parkplatz ohne Ladeplatte. „Für derartige hoch- bzw. vollautomatisierte Szenarien existierten bislang lediglich Prototypen, die noch nicht seriennah waren“, sagt Dr. Michael Schilling, Projektleiter für die Vorentwicklung Automated Driving bei Hella und Verbundkoordinator für das OFP-Projekt. Die OFP wurde vom Verbundkoordinator Hella gemeinsam mit dem Deutschen Zentrum für Luft- und Raumfahrt, Elektrobit Automotive, Infineon Technologies AG, InnoSent, Hella Aglaia Mobile Vision, der Hochschule Reutlingen, der Geschäftsstelle Elektromobilität RWTH Aachen, Streetscooter Research und TWT Science and Innovation entwickelt. Zusätzlich unterstützten Continental und Nvidia als assoziierte Partner.
Sensor und Steuereinheit verbinden
Schon heute sind zwar Fahrerassistenzsysteme in Serie, etwa Stauassistenten, die Daten von zwei Sensoren fusionieren. „Doch für das vollautomatisierte Fahren ist es notwendig, dass die Fahrzeuge ihre gesamte Umgebung wahrnehmen können. Dafür müssen Daten von vielen Sensoren und Kameras fusioniert werden, um ein vollständiges Umgebungsmodell zu erzeugen, dass mit der erforderlichen Genauigkeit die Umwelt abbildet und auf dem sich die Fahrfunktion zuverlässig umsetzen lässt.“ Bislang ist eine standardisierte Schnittstelle zwischen den einzelnen Sensoren und der zentralen Steuereinheit nicht vorhanden. Aktuell sind die Schnittstellen der Fahrerassistenzsysteme sehr funktionsspezifisch und abhängig vom jeweiligen Zulieferer bzw. Automobilhersteller. Genau hier setzte das Forschungsprojekt an.
Als Input für die OFP dienten im Projekt vier Kameras und acht 77-GHz-Radarsensoren, die jeweils 360° um das Fahrzeug herum abdecken. Ein zusätzliches Vehicle-to-X-Communication-Modul (V2X-Modul) ermöglichte außerdem die Kommunikation zwischen Fahrzeugen und externer Infrastruktur, etwa der Ladeplatte. Die Verbundpartner haben gemeinsam die Schnittstellenbeschreibungen der einzelnen Komponenten in einer frei verfügbaren „Interface Specification“ offengelegt. Noch während des Projektes wurde vom Forschungsverbund gemeinsam mit weiteren führenden Automobilherstellern und Zulieferern ein ISO-Standardisierungsprozess für die Sensordatenschnittstellen gestartet.
Einheitliche Schnittstelle geplant
Mit Beendigung des Projektes wird eine aktualisierte Schnittstellenbeschreibung veröffentlicht, die auch in den laufenden ISO-Prozess einfließen wird. Damit haben erstmals alle Automobilhersteller und Zulieferer die Möglichkeit, ihre Produkte schnell und einfach in die Fusionsplattform zu integrieren. Hella Aglaia Mobile Vision hat mit dem Umgebungsmodell den zentralen Bestandteil der OFP entwickelt. Über die Visualisierungsmöglichkeiten können Entwickler sehen, wie das Fahrzeug die gesamte Umgebung wahrnimmt und auf dieser Basis entscheiden, welche Sensordaten fusioniert werden sollen. Ob komplexe Fahrerassistenzfunktionen oder vollautomatisierte Fahrfunktionen – sämtliche Funktionen können sie so programmieren.
Die Arbeiten an der OFP gehen auch nach dem Projekt weiter. Zentrale Fragestellungen werden sein, wie sich die Sensordaten mit Machine Learning verarbeiten lassen, um die Funktionen zu verbessern und die Entwicklungsarbeit weiter zu beschleunigen. Auch soll das Parkplatz-Szenario um urbane Fahrsituationen bzw. bei über 20 km/h erweitert werden. Diese Szenarien erfordern ein Zusammenspiel mit weiteren Sensoren, wie LiDAR. Genau in diesem Bereich der multisensoriellen Datenfusion kann die OFP schließlich ihr gesamtes Potenzial ausspielen. Darüber hinaus wird bei der Weiterentwicklung die funktionale Sicherheit eine große Rolle spielen, um zu gewährleisten, dass sämtliche entwickelte Funktionalitäten ausfallsicher funktionieren.
:quality(80)/images.vogel.de/vogelonline/bdb/1538400/1538434/original.jpg "Virtuelle Tests helfen bei der Entwicklung von Technologien für das Autonome Fahren. (IPG)")
Mit virtuellen Szenarien zum Autonomen Fahren
:quality(80)/images.vogel.de/vogelonline/bdb/1517800/1517824/original.jpg "Wie sich autonomes Fahren auf Verkehrsfluss und -nachfrage auswirkt, untersucht das KIT im Projekt bwirkt. (Manuel Balzer, KIT)")
Autonomes Fahren – Auswirkungen auf Verkehr und Gesellschaft
(ID:45827224)
:quality(80)/p7i.vogel.de/wcms/46/01/4601c9993ed5ac137561d9d1a920d342/0126269331v2.jpeg "Marquardt hat eine Lenkrad-Handerkennung für automatisierte und teilautomatisierte Fahrfunktionen entwickelt. (Bild: Marquardt)")
:quality(80)/p7i.vogel.de/wcms/d3/d2/d3d259154043af9bf6c510169d2d40a7/0126203747v2.jpeg "ZKW, die FHWN und das AIT arbeiten an einer neuen Architektur von Steuergeräten, die nicht nur weniger Kabel im Fahrzeug benötigt, sondern auch die Struktur von Software- und Sensorik erheblich vereinfacht. (Bild: ZKW Group)")