
:quality(80)/p7i.vogel.de/wcms/1f/a7/1fa7f5ddf7f6e61cfb41eeadc605b1b2/0131918763v2.jpeg "Mobileye will 2027 mit eigenen Robotaxis an den Start gehen. (Bild: Mobileye)")
:quality(80)/p7i.vogel.de/wcms/79/b4/79b48ddeb7fc423a8e60ef10bfbdab79/0131673894v2.jpeg "Freuen sich auf die zukünftige Kooperation: Rafael Manfredi,Abteilungsleiter, IAV Brasilien, Fábio Limeira, Head of Development, Marcopolo) und Michael Schreiber, Managing Director, IAV Brasilien (vlnr). (Bild: IAV )")
:quality(80)/p7i.vogel.de/wcms/a3/cf/a3cfb1dc4d85f32fe92869478baec11a/0131669127v2.jpeg "Rheinmetall verkauft seinen Geschäftsbereich Power Systems an Aequita. (Bild: frei lizensiert bei Pixabay)")
:quality(80)/p7i.vogel.de/wcms/40/81/4081aba92ac4714b7454af57fba88b19/0131666604v2.jpeg "Feierliche Eröffnung des ersten Denza-Stores in Hamburg (Bild: Denza)")
:quality(80)/p7i.vogel.de/wcms/a8/da/a8dacf4ffe902cda867826cf834bd371/0131919261v2.jpeg "Im BMW Werk Regensburg hat Werkleiter Armin Ebner am 19.06.2026 zusammen mit dem Bayerischen Wirtschafts- und Energieminister Hubert Aiwanger sowie Regensburgs Oberbürgermeister Dr. Thomas Burger den symbolischen Startschuss für eine neue Wasserstoffinfrastruktur gegeben. (Bild: BMW)")
:quality(80)/p7i.vogel.de/wcms/e0/e9/e0e9b537ea5c84ab93246a4b1dcea10b/0131918196v2.jpeg "In Berlin zeigt man anhand einer Realfahrt mit dem von der TU München entwickelten Forschungsfahrzeug Edgar, wie eine Prüfmethodik unter realen Verkehrsbedingungen aussehen könnte. (Bild: TÜV-Verband)")
:quality(80)/p7i.vogel.de/wcms/d2/c0/d2c0409b8f1ea07c68011b22e4e1e727/0131913748v2.jpeg "Zusammen mit EcoG und EV-Tech hat the Mobility House die 11-kW-DC-Wallbox ChargeLine Bidi zur Serienreife gebracht. (Bild: The Mobility House)")
:quality(80)/p7i.vogel.de/wcms/68/b3/68b3f225602c756f5b582599be0b87d6/0131904075v2.jpeg "Das hochpräzise Rangieren und Koppeln von Driveboard und Kapseln ist eine zentrale Funktion, um den modularen Ansatz des U-Shift zu ermöglichen. (Bild: DLR)")
:quality(80)/p7i.vogel.de/wcms/e3/05/e3052b45feff94facda21ed4bd1464cd/0131869666v2.jpeg "Stellantis, Wayve und Uber wollen eine Kooperation für autonomes Fahren schließen und haben dementsprechend ein Memorandum of Understanding unterzeichnet. (Bild: Stellantis)")
:quality(80)/p7i.vogel.de/wcms/5e/d1/5ed1dc1151a0e33363d1bc1a5378cf98/0131859128v2.jpeg "Für die Luftfahrtindustrie können Brennstoffzellenantriebe zu mehr Nachhaltigkeit beitragen. Ihr Einsatz ist allerdings mit Herausforderungen verbunden. (Bild: FEV)")
:quality(80)/p7i.vogel.de/wcms/4f/bc/4fbc95a0fd4377f7a9e01f6b678be072/0131817931v2.jpeg "3D-Vorschau auf das SAF-Projekt im Hafen von Dunkirk, wo zukünftig das Joint Venture von Technip Energies, Airbus, Safran und Tereos angesiedelt sein wird. (Bild: Technip Engines )")
:quality(80)/p7i.vogel.de/wcms/ca/c7/cac7c4262fa4c80776083b2698a21748/0131736216v2.jpeg "Zusammen mit 16 weiteren EU-Mitgliedsstaaten will Deutschland autonomes Fahren - vor allem im ÖPNV und im Gütertransport - grenzübergreifend nach vorne bringen. (Bild: Hamburger Hochbahn)")
:quality(80)/p7i.vogel.de/wcms/c3/68/c368a3ad72ac970809451c311e05a07b/0127817359v2.jpeg "Der Erfolg der Zürcher S-Bahn: Die Doppelstockzüge, seit 1990 im Netz der Zürcher
S-Bahn eingesetzt werden. (Bild: SBB/CFF/FFS)")
:quality(80)/p7i.vogel.de/wcms/6a/4f/6a4f63cfca5e01026d25edd19b5302c5/0127761368v3.jpeg "Mit der Bahn quer durch Europa: Durch die neuen Pläne sollen Flüge reduziert werden und der Schienenverkehr ausgebaut werden. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/42/86/4286fd057b5413102fbac1758d2dc55f/0127713923v3.jpeg "Rheinmetall wirde mit dem Red Dot Design Award 2025 für den Ladebordstein im Gesamtwettbewerb „Product Design“ in der Kategorie „Innovative Design“ prämiert. (Bild: Rheinmetall)")
:quality(80)/p7i.vogel.de/wcms/36/49/36496a26b0c295de6d9a36d66ea7571a/0125402418v3.jpeg "Eine chinesische Magnetschwebebahn erreichte 650 km/h in nur 7 Sekunden. (Bild: Dall-E / KI-generiert)")
NVIDIA-Hardwareplattform und CarMaker trainieren Deep-Learing-Algorithmen
Wird die Hardwareplattform von NVIDIDA mit der Simulationssoftware CarMaker verknüpft, lassen sich Deep-Learning-Algorithmen für den virtuellen Fahrversuch trainieren. Damit sollen sichere Systeme für selbstfahrende Autos möglich werden.
Anbieter zum Thema
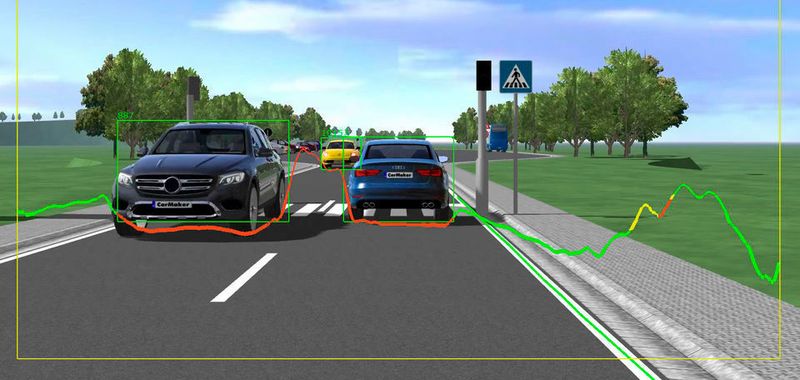
Wie bringt man ein Fahrzeug dazu, selbstständig und autonom zu fahren? Man lässt es bei echten Fahrern zuschauen und lernen. Möglich macht das die offene Computing-Plattform DRIVE PX 2 von NVIDIA. Das Besondere der Hardwareplattform ist die Graphics Processing Units (GPUs). Mit ihr lassen sich neuronale Netze und Deep Learning-Anwendungen schneller entwickeln und testen, als wenn eine herkömmliche CPU zum Einsatz kommt.
Die auf neuronalen Netzen basierenden Algorithmen erkennen schon nach Kurzem in Echtzeit, wie andere Verkehrsteilnehmer oder Verkehrsschilder aussehen und ermöglichen selbst in komplexen Verkehrssituationen eine Orientierung im Straßenverkehr. Die Simulationssoftware CarMaker kann mit der NVIDIA-Hardwareplattform verknüpft und zum Training von neuronalen Netzen im virtuellen Fahrversuch verwendet werden. Darüber hinaus ermöglicht es die Verknüpfung, auch Deep Learning-Sensorfusionsalgorithmen zur Steuerung von Fahrerassistenzsystemen und automatisierten Fahrfunktionen virtuell zu entwickeln und testen.
360-Grad-Umgebung in Echtzeit
Die NVIDIA-Grafikprozessoren sind so leistungsfähig, dass sie auch für die Interpretation von Sensordaten einsetzbar sind. Die Daten von bis zu zwölf Kameras sowie von Lidar-, Radar- und Ultraschallsensoren können ausgewertet werden und so eine vollständige 360-Grad-Umgebung in Echtzeit abbilden. Deep Neural Networks (DNN) ermöglichen bei der Erkennung und Klassifizierung von Objekten eine hohe Genauigkeit der Ergebnisse aus den zusammengelaufenen Sensordaten und lassen das autonome Auto präzise und auf einer sicheren Route fahren, die angepasst an die jeweiligen Umstände ist.
Die Simulationslösungen der CarMaker-Produktfamilie und der NVIDIA-Hardwareplattform miteinander zu verknüpfen, eröffnet den Entwicklungsabteilungen der Fahrzeughersteller und Zuliefererindustrie auch die Möglichkeit, frühzeitig Fahrerassistenzsysteme und automatisierte Fahrfunktionen im virtuellen Fahrversuch zu testen. Bislang wurde dem neuronalen Netz ein reales Fahrvideo mit entsprechenden Daten zu Fahrbahnmarkierungen, Verkehrsteilnehmern, Gebäuden oder geparkten Autos in verschiedenen Sicht- und Wetterverhältnissen wie Wolken, Nebel, Schnee und Regen, Tag oder Nacht vorgespielt. Mithilfe von CarMaker lassen sich reproduzierbare Daten unterschiedlichster Szenarien virtuell erzeugen und zum Training der neuronalen Netze verwenden.
Kamerabilder sind mit Steuergerät verknüpft
Verknüpft mit der Video-Interface-Box sind zudem Closed-Loop-Testverfahren von Kamerasteuergeräten durch direkte Bildeinspeisung möglich. Beim Testen von Fahrerassistenzsystemen auf sogenannten Hardware-in-the-Loop-Prüfständen kann es aufgrund der fehlenden Synchronisation zwischen Bildaufbau im Monitor und der Bilderfassung in der Kamera zu zerrissenen Bildern kommen. Gleichzeitig sind digitale Flachbildschirme zu licht- und kontrastschwach, um Eingangsdaten für Lichtassistenzfunktionen liefern zu können.
Ebenfalls ist es möglich über GMSL (Gigabit Multimedia Serial Link) Bilder der Simulationsumgebung direkt in das NVIDIA DRIVE PX 2 einzuspeisen. Im Closed-Loop-HIL-Verfahren kann die Video-Interface-Box kamerabasierte Funktionen mit weiteren Steuergeräten inklusive der simulierten Umfeldsensorik überprüfen und somit die Vorteile des virtuellen Fahrversuchs auch im Kontext einer Sensordatenfusion nutzen.
:quality(80)/images.vogel.de/vogelonline/bdb/1394300/1394374/original.jpg "In der aktuellen Version 7.0 von CarMaker bietet IPG Automotive unter anderem detaillierte Sensormodelle und die Möglichkeit, verschiedene Testkilometer parallel zu simulieren. (IPG Automotive)")
Virtueller Fahrversuch: Aktuelle Version 7.0 von CarMaker mit neuen Funktionen
:quality(80)/images.vogel.de/vogelonline/bdb/1389300/1389314/original.jpg "Autonomes Fahren mit E-Antrieb: ASAP setzt Künstliche Intelligenz bei Funktionsab-sicherungen ein. (IPG Automotive)")
Autonomes Fahren und E-Mobilität – Künstliche Intelligenz sichert Funktion ab
(ID:45341410)
:quality(80)/p7i.vogel.de/wcms/82/9a/829af2f01c704d3e3eaf802bc1099733/0128290644v2.jpeg "Steffen Schmidt, President & CEO von IPG Automotive (links) und Marius Reuther, CEO b-plus automotive (rechts) besiegeln die strategische Partnerschaft für eine durchgängige ADAS/AD-Validierung nach der Unterzeichnung des Memorandum of Understanding mit einem Handschlag. (Bild: IPG Automotive)")
:quality(80)/p7i.vogel.de/wcms/23/2c/232c72b7536b0208632e3c4d69baa8f8/0130819693v2.jpeg "Yanmar America, Hersteller von landwirtschaftlichen Geräten, Energiesystemen und Industriemotoren, setzt auf Deep Reinforcement Learning, um die Technik ihrer Abgasnachbehandlung zu optimieren. (Bild: Yanmar America)")