
:quality(80)/p7i.vogel.de/wcms/de/fa/default_article/default-article-image.jpeg "(Maks Lab - stock.adobe.com)")
:quality(80)/p7i.vogel.de/wcms/95/ad/95ad78a7cdee40141b79bf7c3c07f573/fu-c3-9fball-wm-2026-ki-1364x768v1.jpeg "Die Fußball-Weltmeisterschaft 2026 läuft noch bis zum 19. Juni. (Bild: KI-generiert / Gemini)")
:quality(80)/p7i.vogel.de/wcms/1f/a7/1fa7f5ddf7f6e61cfb41eeadc605b1b2/0131918763v2.jpeg "Mobileye will 2027 mit eigenen Robotaxis an den Start gehen. (Bild: Mobileye)")
:quality(80)/p7i.vogel.de/wcms/79/b4/79b48ddeb7fc423a8e60ef10bfbdab79/0131673894v2.jpeg "Freuen sich auf die zukünftige Kooperation: Rafael Manfredi,Abteilungsleiter, IAV Brasilien, Fábio Limeira, Head of Development, Marcopolo) und Michael Schreiber, Managing Director, IAV Brasilien (vlnr). (Bild: IAV )")
:quality(80)/p7i.vogel.de/wcms/e4/b0/e4b0eef7b87ac0c5c8af13de9a16d2f7/0131943015v2.jpeg "Mit Vision Data Analyzer 4.1 stellt Accurate Technologies eine MDF4-Analyseplattform für die Automotive-Entwicklung zur Verfügung. (Bild: Accurate Technologies)")
:quality(80)/p7i.vogel.de/wcms/a9/dd/a9dd7cbff895f7c9bf93d23238b85981/keyou-hice40-actros-h2-sattelzugmaschine-key-visual-pressphoto-02-cmyk-3982x2238v1.jpeg "Keyou bietet die umgerüsteten Lkw künftig unter der Bezeichnung „Keyou Hice 4.0“ an. (Bild: Keyou)")
:quality(80)/p7i.vogel.de/wcms/4d/73/4d737fa15b94de4aa0543e4e10e2b5bb/0131933181v4.jpeg "Mit der QSE-5 konnte QuantumScape bereits das erste für den kommerziellen Einsatz vorgesehene Produkt vorgestellen. Nun gewann man auch Honda R&D als Forschungspartner. (Bild: QuantumScape)")
:quality(80)/p7i.vogel.de/wcms/db/74/db748018856c172cd5fcf6e75a1565dc/0131923452v2.jpeg "Mit dem Vectron X erweitert Siemens die bewährte Vectron Plattform zu einer digital vernetzten Lokomotive mit App Store und integrierten Serviceprozessen. (Bild: Richard Oed)")
:quality(80)/p7i.vogel.de/wcms/e3/05/e3052b45feff94facda21ed4bd1464cd/0131869666v2.jpeg "Stellantis, Wayve und Uber wollen eine Kooperation für autonomes Fahren schließen und haben dementsprechend ein Memorandum of Understanding unterzeichnet. (Bild: Stellantis)")
:quality(80)/p7i.vogel.de/wcms/5e/d1/5ed1dc1151a0e33363d1bc1a5378cf98/0131859128v2.jpeg "Für die Luftfahrtindustrie können Brennstoffzellenantriebe zu mehr Nachhaltigkeit beitragen. Ihr Einsatz ist allerdings mit Herausforderungen verbunden. (Bild: FEV)")
:quality(80)/p7i.vogel.de/wcms/4f/bc/4fbc95a0fd4377f7a9e01f6b678be072/0131817931v2.jpeg "3D-Vorschau auf das SAF-Projekt im Hafen von Dunkirk, wo zukünftig das Joint Venture von Technip Energies, Airbus, Safran und Tereos angesiedelt sein wird. (Bild: Technip Engines )")
:quality(80)/p7i.vogel.de/wcms/ca/c7/cac7c4262fa4c80776083b2698a21748/0131736216v2.jpeg "Zusammen mit 16 weiteren EU-Mitgliedsstaaten will Deutschland autonomes Fahren - vor allem im ÖPNV und im Gütertransport - grenzübergreifend nach vorne bringen. (Bild: Hamburger Hochbahn)")
:quality(80)/p7i.vogel.de/wcms/c3/68/c368a3ad72ac970809451c311e05a07b/0127817359v2.jpeg "Der Erfolg der Zürcher S-Bahn: Die Doppelstockzüge, seit 1990 im Netz der Zürcher
S-Bahn eingesetzt werden. (Bild: SBB/CFF/FFS)")
:quality(80)/p7i.vogel.de/wcms/6a/4f/6a4f63cfca5e01026d25edd19b5302c5/0127761368v3.jpeg "Mit der Bahn quer durch Europa: Durch die neuen Pläne sollen Flüge reduziert werden und der Schienenverkehr ausgebaut werden. (Bild: frei lizenziert)")
:quality(80)/p7i.vogel.de/wcms/42/86/4286fd057b5413102fbac1758d2dc55f/0127713923v3.jpeg "Rheinmetall wirde mit dem Red Dot Design Award 2025 für den Ladebordstein im Gesamtwettbewerb „Product Design“ in der Kategorie „Innovative Design“ prämiert. (Bild: Rheinmetall)")
:quality(80)/p7i.vogel.de/wcms/36/49/36496a26b0c295de6d9a36d66ea7571a/0125402418v3.jpeg "Eine chinesische Magnetschwebebahn erreichte 650 km/h in nur 7 Sekunden. (Bild: Dall-E / KI-generiert)")
Wie sich die RDC-Performance im Antriebsstrang simulieren lässt
Wie lässt sich die Performance eines Resolver-Digital-Wandlern (RDC) in einem Antriebsstrang simulieren? Und wie können reale Ereignisse – wie etwa ein starkes Bremsen oder plötzliches Beschleunigen des Fahrzeugs – analysiert werden?
Anbieter zum Thema
:fill(fff,0)/images.vogel.de/vogelonline/companyimg/113400/113491/65.gif "metrofunk-logo.gif ()")
Die verschiedenen Subsysteme eines Autos stellen vielfältige Anforderungen. Zum Beispiel können an der per Keilriemen angetriebenen Generator-Anlasser-Kombination Beschleunigungen bis zu 50.000-1/s auftreten, während sich die Beschleunigung von per Kurbelwelle angetriebenen Systemen im Bereich von 20.000-1/s bewegt. Bei industriellen Anwendungen können sehr dynamische Servomotoren in zwei bis drei Millisekunden von null auf eine Drehzahl von 5.000-1 beschleunigen.
In bestimmten Anwendungen sind starke Bremsungen und sofortige Beschleunigungen möglich, wenn der Motor wegen eines Hindernisses angehalten wird. In solchen Einsatzfällen kann es zu Verzögerungen und Beschleunigungen von bis zu 200.000 rad/s² kommen. Unter diesen Umständen werden kurzzeitig größere Positionsfehler toleriert, jedoch müssen innerhalb weniger Millisekunden wieder korrekte Positionswerte vorliegen. Für eine einwandfreie Motorregelung muss die Verzögerung zwischen dem Einlesen der Position und der Ausgabe der Winkelinformation exakt bekannt sein.
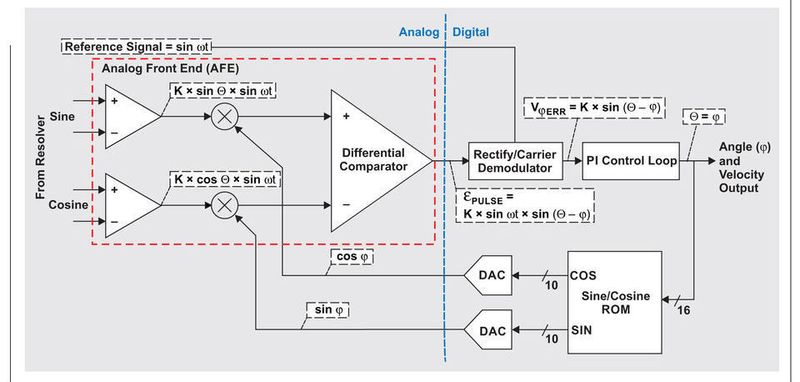
Die Architektur von Resolver-Digital-Wandlern
Bild 1 zeigt einen RDC mit einer PLL/VCO-basierten Architektur, der die vom Resolver kommenden analogen Signale in digitale Winkel- und Geschwindigkeitsinformationen umwandelt. Die Winkelinformation ist per Amplitudenmodulation auf die von den Statorwicklungen kommenden Signale aufmoduliert. Diese Signale müssen deshalb demoduliert und aufbereitet werden, um die Winkel- und Geschwindigkeitsinformationen zu extrahieren.
.")
Die RDC-Architektur dient in erster Linie dazu, den Drehwinkel Θ und die Geschwindigkeit (Drehzahl) der Resolver-Welle zu berechnen. Bild 1 veranschaulicht, wie die Winkelstellungs-Information aus der Hüllkurve bzw. den Scheitelspannungen der Sinus- und Cosinussignale am Eingang extrahiert wird.
Modellierung des Systems
Mit einem auf MATLAB Simulink basierenden Architekturmodell lassen sich mehrere Anwendungsfälle auf der System-Ebene simulieren, wie es in Bild 2 für den PGA411-Q1 erfolgte. Für die Analyse verschiedener Konfigurationen enthält das Systemmodell zwei Hauptabschnitte.

Der in Bild 3 dargestellte Resolver-Eingangsblock unterstützt verschiedene Szenarien des realen Systems, wie zum Beispiel:
1. Statische Winkelmessung
2. Sprungförmige Änderung des Eingangswinkels
3. Individuelle Beschleunigung bzw. Verzögerung
4. Plötzliche Beschleunigung bzw. starkes Bremsen
5. Auswirkungen in das System eingekoppelter Störgrößen

Bei den Ausgängen des Resolver-Blocks handelt es sich um simulierte Signale des Resolver-Sensors.

Sinussignal vom Resolver-Sensor: sin Θ × sin ωt
Cosinussignal vom Resolver-Sensor: cos Θ × sin ωt
Darin steht Θ für den Resolverwinkel und ω für die Frequenz des an die Rotorwicklung R1-R2 gelegten Erregersignals. Die amplitudenmodulierten Signale an der Sinus- und Cosinuswicklung des Resolvers werden innerhalb des Resolver-Blocks erzeugt. Es gibt mehrere Möglichkeiten, Eingangssignale in diesen Block einzuspeisen.
Tabelle 1 zeigt die konfigurierbaren Parameter.
1. Sinus und Cosinus
Sinus: (Frequenz x t) + Phasenwinkel
Frequenz: 2π x fR + (sin_phase × 2π/360) + (Winkel × 2π/360)
Cosinus: (Frequenz x t) + Phasenwinkel
Frequenz: 2π x fR, wobei fR = Drehzahl / 60
Phase: π/2 + Richtung x π + (cos_phase × 2π/360) + (Winkel × 2π/360), wobei fR = Drehzahl / 60
2. Beschleunigen und Bremsen
Spezielle sinin- und cosin-Signale (siehe Bild 3) lassen sich direkt in den Block zur Erzeugung der Sinus- und Cosinussignale einspeisen. Diese Eingangssignale werden nach den Gleichungen 1 und 2 mit dem Erregersignal multipliziert. Ziel ist das Aufstellen eines Daten-Arrays für die Sinus- und Cosinussignale.
Zur Erzeugung der speziellen Signale können die Befehle sin [2π × (fstart × t + 0,5 × accel × t²)] und cos [2π × (fstart × t + 0,5 × accel × t²)] verwendet werden.
3. Sprungantwort
Sprung am Sinuseingang
Anfangswert: sin (Winkel1 x 2π/360)
Endwert: sin (Winkel2 x 2π/360)
Sprung am Cosinuseingang
Anfangswert: sin [π/2 + (Winkel1 × 2π/360)]
Endwert: sin [π/2 + (Winkel2 × 2π/360)]
4. Rauschanalyse
Die Auswirkungen von Rausche auf die Leistungsfähigkeit lassen sich ebenfalls analysieren. So können die mechanischen Vibrationen des Systems ein gewisses Rauschen hervorrufen, das Änderungen des Ausgangswinkels bewirkt. Diese Änderungen müssen auf einen gewissen Bereich eingegrenzt werden (z. B. auf ±0,5°). Weißes Rauschen wird erzeugt und mit einem Faktor K (siehe Bild 3) multipliziert.
(ID:45032600)
:quality(80)/p7i.vogel.de/wcms/5c/e4/5ce41ec6c6dc30a9f017266e71d9ade6/0125425439v2.jpeg "Bild 1: Schema einer Punkt-zu-Punkt-LVDS-Verbindung. (Bild: TI)")
:quality(80)/p7i.vogel.de/wcms/41/91/4191214f5c7483b57bab70b464efaf7e/0131503907v2.jpeg "TDK wird einen neuen, störfeldrobusten Fast-Hall-Sensor mit analogen Ausgängen für ASIL-D-Anwendungen auf den Markt bringen.
(Bild: TDK )")